
在加州测试自动驾驶的公司,都是要交“作业”的。
2月的第一天,加州车辆管理局公布了11家企业提交的自动驾驶“脱离报告”(Disengagement Report,是指自动驾驶测试中,无法进入自动驾驶模式或终止自动驾驶模式改由人工控制的情况)。这个传统从2015年开始,获得自动驾驶车牌并在加州测试的公司每年都要汇报,今年是第二次循例提交。
报告的内容包括:
1.自动驾驶汽车路测里程;
2.“脱离”次数;
3.“脱离”原因。
自动驾驶要在不断测试中应对现实交通环境的挑战,某种程度上来说,“脱离”次数越少,系统越稳定,因此不少人把“脱离”报告看作在测车企的年度成绩单。
不过,在进入报告正文相互比较之前,我们先敲黑板划一些重点:
首先,加州对自动驾驶的态度最开放,但几乎所有企业在其他城市、各种路况和地形,当然也在不同国家测试自动驾驶汽车,所以加州测试没法反应各家公司在自动驾驶路测的全貌。
其次,SAE把自动驾驶分为5个等级,每家公司都处在自动驾驶研发的不同阶段,表现的也只能说明不同级别自动驾驶的进展,比如有些公司的测试主要集中在高速路,有的遍布城市、私人道路甚至赛车场,因此横向比较意义不大。
这样看起来,“脱离”报告似乎只能看出测试公司的态度和大致方向。不过因为今年是第二年提交报告,对部分连续提交的企业来说,就有了对比数据,多少都能反映出技术进展。各家情况不同,自己和自己赛跑的意义也很重大。

最勤勉——Google Auto, LLC/Waymo
谷歌把自动驾驶项目单独成立公司Waymo,并设有子公司Google Auto LLC,所以今年报告方也改为了Waymo。报告依然最规整详细,Waymo在11家公司中也最勤勉,走过的路程总数排名第一,主要测试道路是加州景山市及其周边社区的典型空旷街道,地属郊区。
2016年:行驶里程635868英里,“脱离”124次,约0.2次/英里,测试车70辆。
2015年:行驶里程424331英里,“脱离”341次,约0.8次/英里,测试车49辆。
“脱离”原因包括下面几个:软件冲突(software discrepancy,比如无法准确使用GPS等各种功能),测试时天气情况,人类司机行为鲁莽,意料之外的汽车行为,传感器未能正确识别马路上的物体,对其他交通参与者行为的错误判断,测试遇到施工区域,遇到紧急车辆,道路上发现残骸垃圾。
主要“脱离”原因是软件冲突,有51次,这意味着很多功能在自动驾驶模式下未必好用。30次来自车辆采取驾驶员不想使用的策略,20次来自传感器失效。其中测试遇到施工区域,遇到紧急车辆,道路上发现残骸垃圾,各“脱离”2次,天气原因“脱离”1次。
总体来看,“脱离”占比从0.8次/英里,下降到了0.2次/英里,主要发生在街道和高速公路,其中街道“脱离”112次,高速公路“脱离”12次。
模式切换也是测试的一部分,Waymo会每天主动测试切换下自动驾驶和人工驾驶。目前来看,“脱离”次数不会被完全消灭,更加安全地模式切换也是一个重要命题。报告显示,驾驶员接到提醒后,都能在1秒内接管车辆控制权,统计下来平均时长为0.9秒。
看上去,Waymo比去年成绩提升了一大截,处理一些复杂情况的可靠性也提高了。而且我们都知道,谷歌把自动驾驶汽车独立出来成立部门是想尽快商业化,去年年底传出传感器成本骤降90%、打车专利也随之曝光,这都让我们对谷歌落地自动驾驶汽车有了更多期待。
似乎是随便跑跑——Tesla
特斯拉去年提交的报告中,因为对行驶数据保密,所以记录在册的行驶里程和“脱离”次数都是0。今年虽然累积了一些测试里程,但数量不多,颇有一些“重在参与”的感觉。
2016年:行驶里程550英里,“脱离”182次,测试车4辆。
2015年:行驶里程保密,“脱离”次数保密。
报告显示,特斯拉2016年测试的550英里是在10月和11月集中累积的,其他月份车子都没有上路。看起来,特斯拉几乎不怎么在加州公共道路专门测试它的自动驾驶汽车。这一点好像并不奇怪,因为特斯拉更倾向分阶段把自动驾驶产品Autopilot装上车,鼓励用户使用,间接测试和完善系统。
不过,特斯拉 Autopilot 的项目负责人 Sterling Anderson曾经在一次演讲提到,他们会事先测试更加先进的自动驾驶技术,在开启新的 Autopilot 功能之前,特斯拉都会将 Autopilot 系统搭载到7万辆车上专门进行数千万英里的测试。
大家更关心的,其实是特斯拉Autopilot模式下积攒的里程数。这个数据在去年也有过公开。2016年11月官方表示,在 Autopilot 模式下,特斯拉车辆的行驶里程已经达到了3亿英里。撇开“让用户测试是否安全”的争议,这种里程累积方式速度显然要比谷歌和传统车企的方法快得多。
稳扎稳打——Mercedes Benz、Nissan
从2月到11月,梅赛德斯奔驰开了673英里,但是这家公司接管了系统336次——几乎每2英里就要人工介入一次,即499次/千英里。在这些人工介入中,驾驶员手动接管占到了183次,系统主动交回控制权有153次。
2016年:行驶里程673.42英里,“脱离”336次,约499次/千英里,测试车1辆。
2015年:行驶里程1739.08英里,“脱离”1057次,约608次/千英里,测试车2辆。
梅赛德斯奔驰在报告中指出,所有里程累积都在城市街道而非高速公路完成。城市街道对自动驾驶汽车而言,还要考虑交通信号灯以及路上的行人和其他意想不到的车辆,所以路况更复杂。5%的测试在雨天进行,期间没有发生“脱离”。
2015年度报告梅赛德斯奔驰解释“脱离”原因时比较含糊,主要为司机不舒服、技术评估管理、道路施工等,并不能反应太多系统可靠性。今年的说明依然简要,系统没有进入自动驾驶模式是因为技术评估管理,人类驾驶员有几次主动申请介入,主要原因是感觉不舒服。从自动驾驶发出接管警告到人类接手平均时间为1秒。
日产在2016年看到了自动驾驶系统的重要性,每个月在加州公路都会测试,测试道路涉及州际道路、高速路、快速路、农村道路、街道以及停车场等。
2016年:行驶里程4099英里,“脱离”29次,约6.8次/千英里,测试车5辆。
2015年:行驶里程1485.4英里,“脱离”106次,约7.1次/千英里,测试车4辆。
2015年,日产的自动驾驶汽车有过雨天行驶电脑死机,反应时间长达4秒的经历,今年29次“脱离”都是在晴好天气发生,但日产没有交代这次有没有进行特殊天气测试。7次“脱离”原因是软件冻结。有几起是在过铁轨时,发动机控制单元拒绝软件发出的控制指令。另有数次,系统没有发现前车。其中有个案例,车辆冲出左转弯道,还有案例汽车突然改变方向。“脱离”原因有很多种,可以看出,在一些情况下,系统仍然还有优化空间。
看着比去年“糟糕”——Delphi、Bosch
从数据来看,德尔福的表现比去年“糟糕”,测试道路主要在高速公路和街道。
2016年:行驶里程3125英里,“脱离”178次,约57次/千英里,测试车2辆。
2015年:行驶里程17000英里,“脱离”约24次/千英里,测试车2辆。
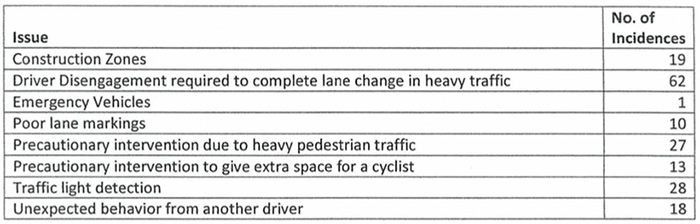
德尔福自动驾驶汽车“脱离”原因汇总
实际上,2015年,排在德尔福“脱离”原因头两位的是车道线模糊(110次)和信号灯未能检测(102次),今年这两个问题看上去已经有所解决。造成“脱离”的很大一部分原因是交通拥堵时人工操作(62次),行人很多驾驶员主动接管驾驶(27次)防止出现事故,遇到施工路段(19次),其他司机驾车行为出乎意料系统主动交出驾驶权(18次)。
博世的表现看上去也不如2015年,虽然里程数涨了一点,但是“脱离”次数增加了不少。
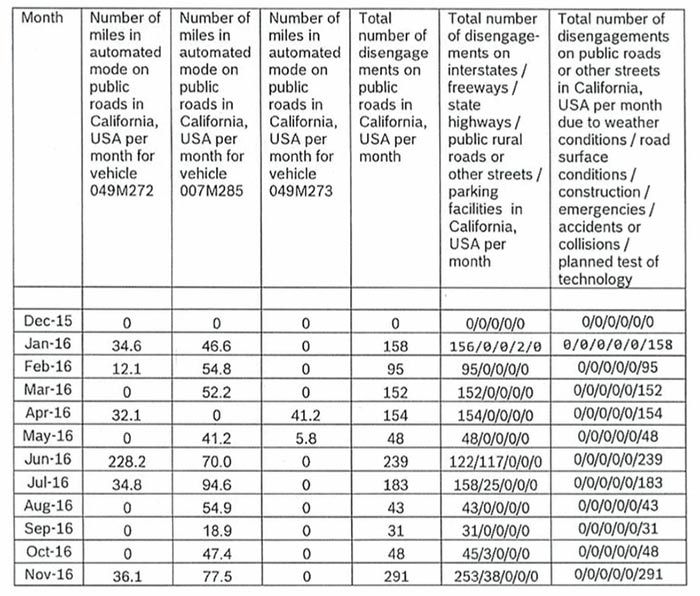
博世自动驾驶汽车“脱离”原因汇总
大多数“脱离”发生在州际公路、高速公路,2起发生在乡村和其他道路。不过报告的“脱离”原因都是测试自动驾驶技术需要,因为他们认为不是所有驾驶情况都可以定量测量输入,所以无法深入分析博世的情况。
2016年:行驶里程983英里,“脱离”1442次,测试车3辆。
2015年:行驶里程935英里,“脱离”625次,测试车2辆。
首次提交报告——Cruise、BMW、Ford
有几家公司是首次提交报告,因此没有对比数据。
通用斥巨资收购的Cruise,2015年6月才获得DMV的牌照,但是因为测试车数量众多,行驶里程数已经比较可观。
2016年:行驶里程9776英里,“脱离”18.5次/千英里,测试车25辆。
报告里面说,大多数人工介入是为了避免意料之外的行为。Cruise还补充说,系统在警示驾驶员情况无法处理后,可以在1秒内完成控制权交接。
BMW获得上路资格后,全年只在2016年3月和4月上路开了一下,唯一的一次人工介入是因为车道线不清晰。驾驶员接管的反应时间在2秒内。
2016年:行驶里程638英里,“脱离”1次。
Ford现在在加州有两辆自动驾驶汽车,但只有1辆参与了路测,只有3月份积累了里程。
2016年:行驶里程590英里,“脱离”3次,约5.1次/千英里,测试车1辆。
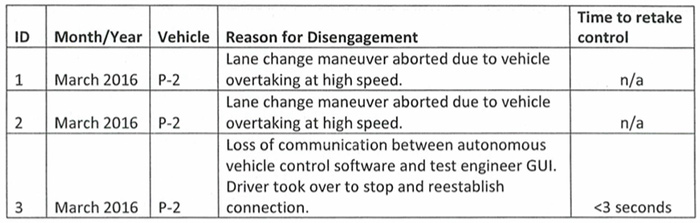
福特自动驾驶汽车“脱离”原因汇总
其中两次是因为目标车道车辆加速导致的换道失败。另一起是因为车辆控制软件和测试工程GUI软件间通讯失效,于是司机接管控制停车后重新建立连接。
没有测试——Volkswagen and Honda
比较特别的是,2015年提交报告的大众和以及获得2016年测试资格的本田都没有在加州测试。根据2015年的报告,大众在加州有两辆车测试,不过都在公路上进行,行驶了14945英里,“脱离”260次,大约17次/千英里。
小结
不得不说,读完各家报告,我们对每家的测试情况依然是模糊的。虽然多数公司对主要测试道路都做了说明,但是具体比例都没有提及,并且提到测试天气的公司数量真心不多。在说明“脱离”原因时,确实有量化统计难度存在,但大多数公司回答的原因还是过于笼统。不过我们还是可以从中发现,一些公司在持续推进研究,去年的问题在被逐步解决。
另外不免想到国内自动驾驶测试的进展。目前智能网联测试示范区遍地开花,但合法路测仍然处于停滞状态。工信部和警方虽然拟定了法规草案,但还没有宣布具体发布时间。不少车企都在呼吁尽快开放国内路测权限,毕竟想要让自动驾驶汽车上路,首先是让它适应中国路况。
智驾注:本文转载来源为车云网,由AutoR智驾转载。

x

-
 韩国团队打造巨型机器人,让阿凡达军团走进现实 2016-12-28 16:33
韩国团队打造巨型机器人,让阿凡达军团走进现实 2016-12-28 16:33 -
 揭秘腾讯布局汽车与出行的万亿版图 2017-02-08 16:00
揭秘腾讯布局汽车与出行的万亿版图 2017-02-08 16:00 -
 先招谷歌旧将,再挖NASA墙角,Uber不仅玩自动驾驶,飞行汽车也在路上 2017-02-08 15:06
先招谷歌旧将,再挖NASA墙角,Uber不仅玩自动驾驶,飞行汽车也在路上 2017-02-08 15:06
-
 微博CEO首曝享界S9乘坐体验:舒适性、售价超越传统豪华轿车,纯血鸿蒙将上车 2024-06-22 21:50
微博CEO首曝享界S9乘坐体验:舒适性、售价超越传统豪华轿车,纯血鸿蒙将上车 2024-06-22 21:50 -
 华为发布盘古大模型5.0 2024-06-24 11:17
华为发布盘古大模型5.0 2024-06-24 11:17 -
 广汽埃安宣布,泰国即将新增6座快充站 2024-06-24 11:29
广汽埃安宣布,泰国即将新增6座快充站 2024-06-24 11:29

 京公网安备 11010502038466号
京公网安备 11010502038466号

 关注官方微信
关注官方微信
