
人工智能时代所有人创业者都想在历史的进程中找到自己的位置,刻上自己的名字。
9月17日,在上海举办的2018年人工智能大会期间,专注于网联自动驾驶系统与部件研发的新型技术公司环宇智行在上海举行“无人驾驶智慧系统Athena发布会”,正式对外发布Athena软件系统。
Athena主要运行在环宇智行自主研发的Titan自动驾驶域控制器上,这两者之间的结合标志着环宇智行软件硬件一体的开放平台正式构建完成。

环宇智行CEO李明表示,“这次Athena的系统是为提高高性能AI的计算,工具和算法,争取完美解决感知和决策的适用性和可靠性的问题,这是我们对今天的期望,我们向完美解决迈出了一步。”
在李明的构想中,环宇智行分为三个部分:一个高性能计算单元的硬件,一个可靠的软件,一个云端运营平台。
与许多自动驾驶初创公司在计算上偏好使用工控机不同,环宇智行刚成立,就基于英伟达的SoC TX2打造控制器——TITAN(泰坦),自主推出了集成控制器。
据悉,目前已开发到第三代的TITAN Ⅲ,其大小只相当于一个路由器,而峰值功耗为60W,与奥迪A8上搭载的zFAS域控制器一样,TITAN Ⅲ也采用了英飞凌的AURIX系列MCU,对传感器与计算单元的状态进行检测,以满足功能安全要求。

由于定位是L4级别,所以在TITAN Ⅲ上,可以同时在6路摄像头上运行深度学习算法,运行UBUNTU操作系统,从现场产品来看,该控制器支持USB、CAN、RS232、Ethernet、AD/DA等多种硬件接口接入,内置标准TX2板卡以及接口板,并且支持动态硬件扩展,可额外扩展一块TX2及接口板。
在功能上,Titan自动驾驶域控制器支持高精地图、自适应巡航系统、车道偏离预警、车道保持系统、前车碰撞警告、自动换道、智能人工交互、行人检测系统、自动紧急刹车系统、一键召车。
针对车道保持系统、行人检测系统、自动紧急刹车系统的可靠性在8月份举办的首届i-VISTA自动驾驶汽车挑战赛中已经得到了很好的验证。
其比赛结果表明,环宇智行一辆长达17米宽3米5高4.5米,重达25吨的重型卡车可在距离障碍物仅仅只有0.2米的距离下成功刹停。
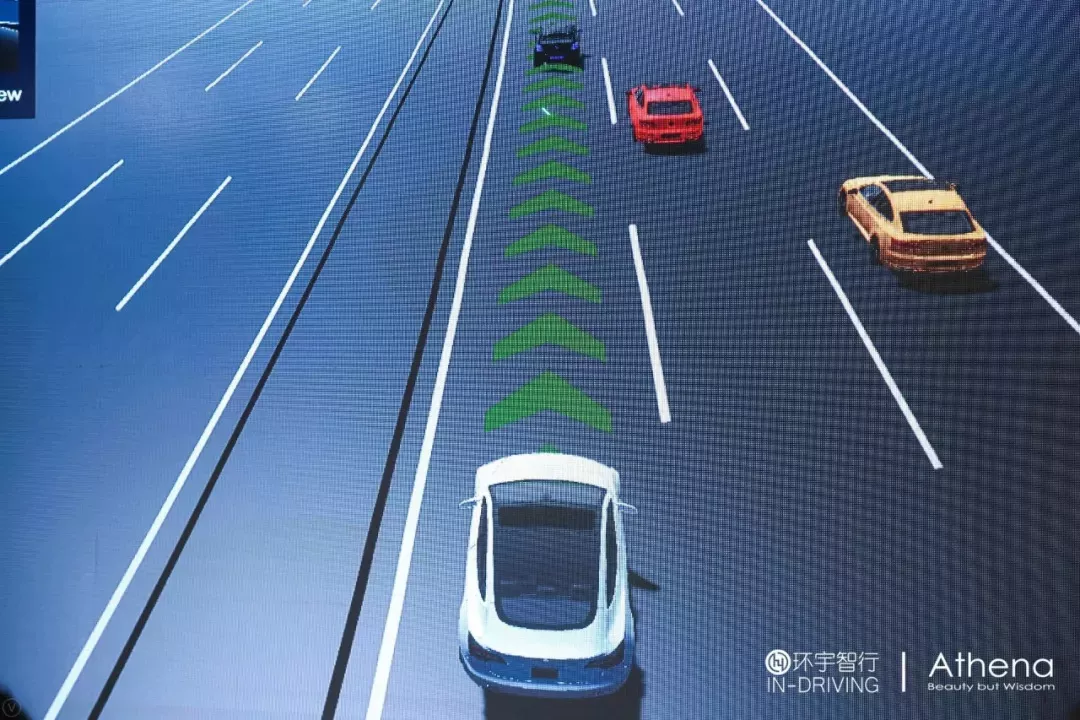
在软件层面,环宇智行通过将Athena与TITAN自动驾驶域控制器结合,实现了高清地图采集、实时三维融合感知和定位、数据存储和高速以太网通信,以及单车、车队和车路协同不同形式的自动驾驶功能,使得车企快速验证自动驾驶技术、缩短量产时间成为可能。
为了更好地证明环宇智行的软件能力,环宇智行在现场通过直播的方式演示了其重型卡车5G网联自动驾驶功能,包括,车道保持系统、自动换道、一键召车、掉头等功能。
通过现场播放一段的视频直播可以看出,环宇智行重型卡车在车道保持系统、自动换道、一键召车、掉头表现较佳,但是掉头过程中重型卡车选择在直行车道进行掉头,车辆在交通规则方面还有待学习。
不过,在实车道路的测试前环宇智行在策略和规划的生成方面通过大量使用仿真最前沿的技术,它能够在概念阶段帮助环宇智行测试算法。
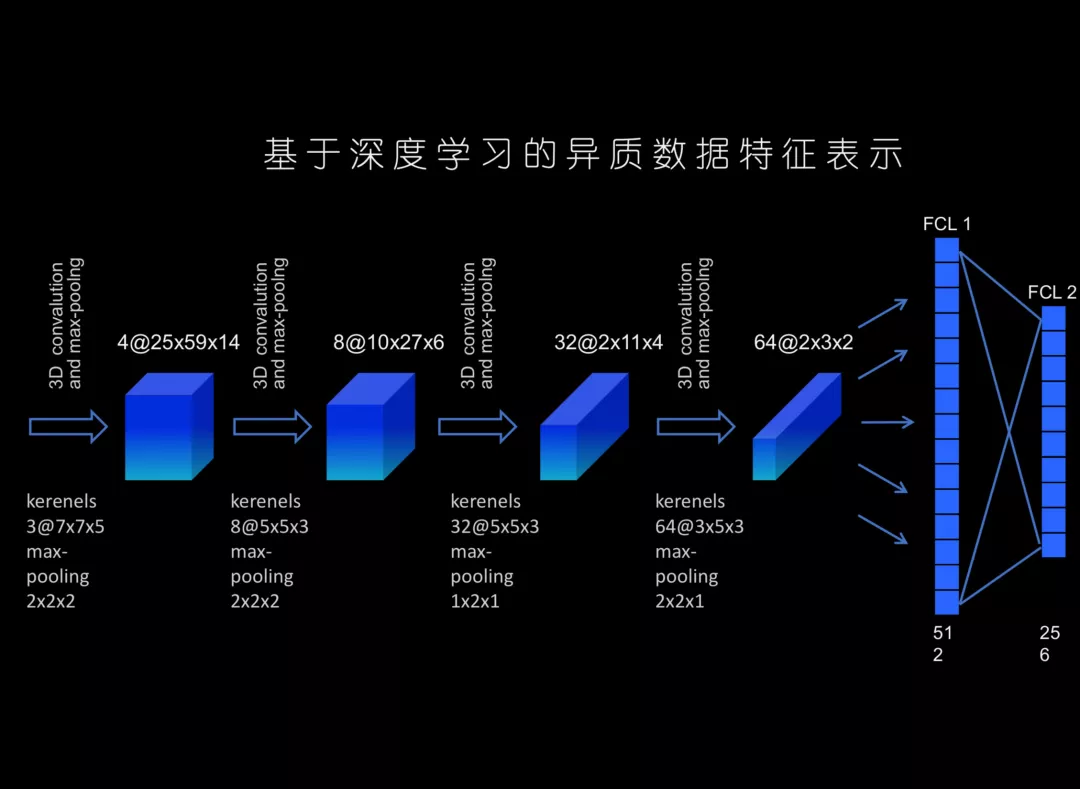
据环宇智行曹晶博士介绍,“得益于人工智能技术的发展,目前自动驾驶领域也发生了一些新的变化,譬如从过去围绕2D图像的视觉感知到现在3D视觉感知的变革。"
在这方面环宇智行获得了很多突破性的进展,包括对三维信息的物理描述,以及直接在点云上做深度学习。
在3D感知层面,环宇智行解决方案包括体证提取层,从点云和图像上分别去提取它的特征;特征融合以及特征选择的模块以及优化以后的定位感知的模块三个部分。
在特征融合层面,包括最低的层级就是数据级的融合,中间是特征级的融合,还有可以单独的让传感器对周围的环境做出判断的决策级融合。

定位方案,环宇智行将信息归结到基础设施里面,这个基础设施是在自动驾驶里面可以提前构建的,不需要实时来构建,并通过图像激光的融合、点云的融合,生成道路标志、道路路牌的生成提取。
而在决策规划层面,环宇智行Athena系统规划部分通过一个导航级的全局规划,定位模块告诉当前的位置,输入想去的目的地坐标,高精度地图会提供复杂的具有拓扑关系的网络,我们可以通过这些信息去搜索出一最短的,从起点到达终点的一路径。
这很类似于我们通常手机上所使用的地图导航,
综合而言,环宇智行基于深度学习用统一的方法去表示异质数据的特征,然后使用了大数据的方法去对特征进行挑选,用挑选以后优化的特征子级得到了一个比较好的智能驾驶3D价值的结果。
作为自动驾驶领域一家新兴的技术公司,早在2008年环宇智行就开始了自动驾驶相关研发,迄今为止已经先后建立了包括激光雷达和相机融合感知定位、决策规划、仿真平台、智能网联车队等在内的一系列领先的自动驾驶技术,涵盖硬件和软件两个不同的方面。
张建伟院士指出,“用人工智能做自动驾驶,未来应该重点考虑在视觉和激光雷达之外更多类人的多模态信息融合方向,同时可以借鉴目前增强学习、连续学习、迁移学习方面的成果来增强自动驾驶车辆的学习能力,需要解决自动驾驶的“三观”问题,特别是道德观,以及针对大规模群体智能的多机器人博弈。这些关键问题的研究和相关技术的研发,也是张院士德国团队和环宇智行研究院合作攻关的方向。”
最后,李明透露,目前环宇智行软硬一体化的方案已接近完成,下一阶段环宇智行的重点将是如何在已有基础上进一步提升该开放平台的可靠性,以及让这一解决方案进行商业化落地。
11月份,在英伟达的GTC China 2018大会上,环宇智行将发布具体的商业化路径,包括针对重卡、乘用车等不同车型的自动驾驶应用场景。

x

-
 马斯克在加州“瞬移”成功,他自己坐特斯拉汽车,以177迈的速度穿越,他说“太刺激”! 2018-12-25 18:44
马斯克在加州“瞬移”成功,他自己坐特斯拉汽车,以177迈的速度穿越,他说“太刺激”! 2018-12-25 18:44 -
 全新天籁上市,日产开启智能驾驶新时代,2022年前中国落地10款日产智行科技车型 2018-12-20 08:40
全新天籁上市,日产开启智能驾驶新时代,2022年前中国落地10款日产智行科技车型 2018-12-20 08:40 -
 试驾新一代奔驰C级:实现自动变道的全球最畅销“奔驰一哥”让奔驰在智能驾驶方面领先宝马奥迪半个身位 2018-11-06 16:25
试驾新一代奔驰C级:实现自动变道的全球最畅销“奔驰一哥”让奔驰在智能驾驶方面领先宝马奥迪半个身位 2018-11-06 16:25
-
 微博CEO首曝享界S9乘坐体验:舒适性、售价超越传统豪华轿车,纯血鸿蒙将上车 2024-06-22 21:50
微博CEO首曝享界S9乘坐体验:舒适性、售价超越传统豪华轿车,纯血鸿蒙将上车 2024-06-22 21:50 -
 华为发布盘古大模型5.0 2024-06-24 11:17
华为发布盘古大模型5.0 2024-06-24 11:17 -
 广汽埃安宣布,泰国即将新增6座快充站 2024-06-24 11:29
广汽埃安宣布,泰国即将新增6座快充站 2024-06-24 11:29

 京公网安备 11010502038466号
京公网安备 11010502038466号

 关注官方微信
关注官方微信
