
印象中机器人都是冷冷的机器,从内到外看不都一点柔软的样子。近日哈佛大学的研究人员采取了不同以往的方法,他们独辟蹊径,制造出了世界上第一个完全软体的且自我驱动的机器人——“小章鱼”。
“小章鱼”是由硅凝胶制作而成,由于用的是软质材料可以灵活变换形状,内部没有常规的电路系统,动力来自触角部位的“触角室”的化学反应。
也就是说,该机器人是不用电池来进行驱动的,是通过过氧化氢燃料源在铂催化剂的作用下反应生成氧气,以气动方式驱动手臂运动。
![OC4CDZV@5U{Z1K9]EM[GJDF](/uploads/1/image/public/201612/20161207115004_lq5ifhbn6i.png)
这样做的前提条件是要把提前写好的程序编入到小章鱼的体内,在小章鱼的体内存在一个可以储存数据的芯片。
由于现阶段技术还没有完全成熟,触角动作还不是很完美,不能带动“小章鱼”漫游前行。只能停在原地,进行原地的康康舞。
舞蹈进行的过程中是需要依赖其内部的气动系统运作,这个气动系统是“小章鱼”的核心技术。
哈佛研究人员因此在期刊《自然》中写道,这一系统标志着软体机器人的重大进步。

发明这个“小章鱼”的目的是为了配合人类完成一些复杂的任务,研究人员希望将来软体机器人能够帮助医生处理棘手的外科手术,或者穿过层层障碍,辅助搜救工作的进行。
像这样的实战任务,若还需要机器人与人类之间的互动,传统坚硬的机器人根本不可能完成这样的任务。这些机器人更适合在重复、有组织的工厂环节下工作。
Truby称,“人们感到很兴奋,他们可以在人际界面看到软体机器人。”
![{2OA(P)}BRP6%I]IR{3KB]N](/uploads/1/image/public/201612/20161207115007_vpqe1m8r66.png)
“小章鱼”柔软的身体是由不同种类的硅凝胶制成,并运用模制和3D打印技术合成形状。
Truby及其伙伴过去花费几年时间不断完善设计,在这之后要做的是向机器人注入动力。他们便可观察其运行情况。

Truby称,“我们当时花了一定的时间准备所有的部件,并且花了几个月的时间将这些部件组合在一起。”
这个过程经过了多次的迭代和调节,直到我们可以将所有部件拿出烘箱,配备动力,‘小章鱼’开始运作为止。”
值得注意的是电路板在其中起交换动作,因此一次性将气体填满四条触角。
![[RA1B7(])M2BU84]}R]%]U6](/uploads/1/image/public/201612/20161207115008_q08dhna7pr.png)
Truby称,章鱼机器人抬起四只脚,放下四只脚,然后开始交换动作。这虽然是一个很简单的动作,却是很重要的进步。
“现在它能够来回拍打触角,但是如果能创造出能感知何时与环境互动的软体机器人就好了。这种机器人会具有更复杂的自动功能模式。”
那么,为什么要将机器人做成章鱼状呢?很明显是为了赞美章鱼。章鱼没有骨架但是很强壮,能够应对各种动作,因此被视为制造软体机器人通讯设备的巨大模型。
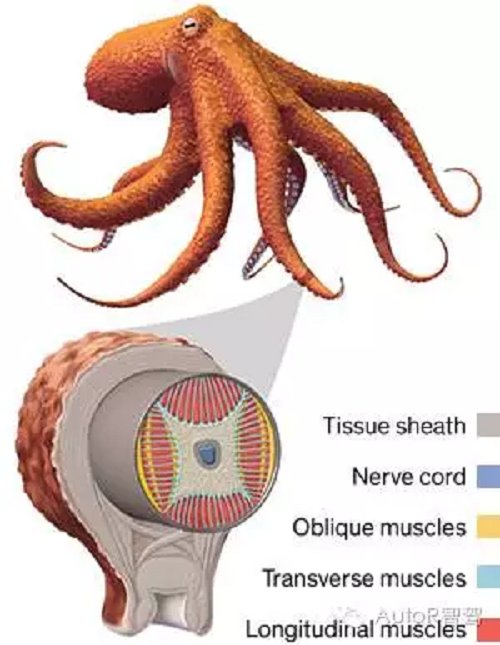
*章鱼解剖:在真实的章鱼触手中,一种十字交叉的肌肉结构使得它可以移动。当纵向肌肉收缩时,触手会变得更短且更胖;当横向肌肉收缩时,手臂会变得更长和更瘦。
“章鱼本身不会靠拍打触角移动,也不会有燃料电池给它供能。”Truby解释道,“我们不是非要从章鱼身上得到灵感,而是考虑到这是我们首次展示全软体机器人,需要借助章鱼的形象。”

目前研究人员都忽略了一件事,就是把这些部件组装在一起。但这并不会影响“小章鱼”人们对它的重视程度,Rossiter教授称,“小章鱼”将成为业内人士研究的跳板。

x

-
 乐视造车:一场事先张扬的蒙眼狂奔 2016-08-15 20:47
乐视造车:一场事先张扬的蒙眼狂奔 2016-08-15 20:47 -
 前途汽车:造车路上低调前行 2016-03-09 12:20
前途汽车:造车路上低调前行 2016-03-09 12:20 -
 特别策划:新造车运动的起因与背后的民营资本 2016-03-09 10:40
特别策划:新造车运动的起因与背后的民营资本 2016-03-09 10:40
-
 微博CEO首曝享界S9乘坐体验:舒适性、售价超越传统豪华轿车,纯血鸿蒙将上车 2024-06-22 21:50
微博CEO首曝享界S9乘坐体验:舒适性、售价超越传统豪华轿车,纯血鸿蒙将上车 2024-06-22 21:50 -
 华为发布盘古大模型5.0 2024-06-24 11:17
华为发布盘古大模型5.0 2024-06-24 11:17 -
 广汽埃安宣布,泰国即将新增6座快充站 2024-06-24 11:29
广汽埃安宣布,泰国即将新增6座快充站 2024-06-24 11:29

 京公网安备 11010502038466号
京公网安备 11010502038466号

 关注官方微信
关注官方微信
